NetLogoLab
The goal of NetLogoLab is to investigate the connections between computer simulations and the physical world. We are building a set of systems which connect multi-agent-based models to physical manipulatives in a variety of topics, such as chemical equilibrium, gas laws, and heat transfer.
Multi-agent-based simulation is a useful tool to understand complex natural phenomena. We want to extend it by connecting agent-based models to the physical world, providing students with tools to build physical counterparts for computer simulations. We believe this symbiotic relationship between on- and off-screen modeling and simulation to be greatly beneficial in terms of breadth of projects, their potential for deep investigation as well as student motivation.
Rationale
What do we obtain from “going out to the world” as a platform for learning? The multiple aspects of this experience have been explored by different schools of thought in education. John Dewey (1916) was one of the first to emphasize the importance of connecting school learning and real-world experiences. Critical pedagogy argued that departing from the learner’s context and previous knowledge is crucial to foster de-facto emancipating and motivating learning (Freire, 1974). Constructionist educators (Papert, 1991) posited that building personally-meaningful public artifacts is central to promote sustainable and deep learner engagement. However, critics of such pedagogies would argue that the world might not afford the necessary information and opportunities for students to learn the ‘official’ school content: One cannot make sure that acid-base reactions, for instance, are out there situated in the world.
While concurring with claims about the relevance of the learner’s context, background, and concrete experiences for education design, we acknowledge that the current tools for scientific exploration available for students limit the kind and complexity of their real-world investigations. Thus, we submit that the disconnect between what one can learn in a fully situated environment and the more traditional school content is due, perhaps, to the lack of appropriate tools to ‘dissect’ reality to the appropriate level of analysis. Even if, by definition, Physics, Chemistry, and Biology are ‘out-there’ in the world, most phenomena are invisible to human vision and time scale. Many patterns in nature are too long, too fast, too small, or too large for learners to extract and understand their underlying structures. Canonical examples are weather behavior, chemical reactions, housing and traffic pattern, particle physics, and population ecology. We need, thus, new technological tools which foreground and unveil the deep structures of such phenomena. In this paper, our focus will be hybrid modeling, a framework for scientific exploration and modeling which merges two types of educational technologies commonly used (separately) in schools. The first kind is robotics and electronic sensing (Martin, 2000), which makes possible a wide range of experimental activities in the real world. The second technology is multi-agent-based simulation, which enable learners to create models to understand complex social and natural phenomena departing from very simple behaviors embedded into elementary computational agents (Wilensky & Reisman, in press; Wilensky & Resnick, 1995).
This research project, by linking the two technologies, attempts to simultaneously broaden the possibilities of situated investigation and ground computer modeling with real-world validation. For that goal, we are developing software and hardware tools to bridge computer models and sensing in real time (see the Models page). Typically, students build a computer model of a particular phenomenon, such as heat transfer, and a sensor-equipped physical device. These are connected by an analog-to-digital interface. Students are able to run their computer models in tandem with the physical apparatus, comparing the outcomes of both, and debugging their model until it matches the real-world data. We are currently building systems for ‘hybrid’ explorations in heat transfer, gas laws, acid-based and oscillating reactions, and Materials Science.
We are conducting a case study comparing the artifacts generated by undergraduate and graduate students in two distinct conditions. In the first condition, students created multi-agent-based models with no sensors. In the second situation, another group of students built hybrid models with sensors. All students built their models as an assignment in an ‘Educational Design’ class. Based on our analysis of their artifacts and interviews, we are identifying the learning gains of hybrid, sensor-equipped models, as well as determining to what extent this approach can effectively expand the possibilities of situated investigation.
Models
Heat Transfer
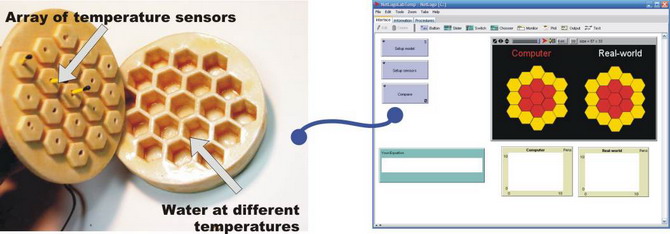
Computer Model
Simulates heat transfer in a hexagonal grid using user-defined algorithms
Physical Model
A grid of 19 hexagonal cells and a cap with holes for temperature sensors. The cells should be filled with any liquid, but the center cell has to be filled with hot or cold liquid. Heat will diffuse to the neighboring cells and the sensors will detect the temperature change. The information is displayed in the NetLogo model and users can see the two models evolving at the same time.
Goal
Comparison between a computer model of heat transfer, which students themselves code, and a physical apparatus that mimics the shape of the model’s grid. By comparing their computer model with the information from the physical model, students can change, debug and refine their model.
Gas Laws
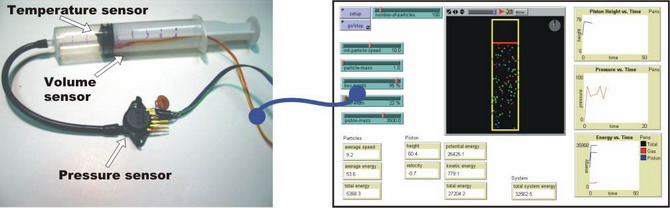
Computer Model
Simulates gas molecules in a container.
Physical Model
A plastic syringe with temperature, volume (stretch) and pressure sensors. The information is displayed in the NetLogo model and users can see the impact in temperature of varying volume and pressure.
Goal
A grid of 19 hexagonal cells and a cap with holes for temperature sensors. The cells should be filled with any liquid, but the center cell has to be filled with hot or cold liquid. Heat will diffuse to the neighboring cells and the sensors will detect the temperature change. The information is displayed in the NetLogo model and users can see the two models evolving at the same time.
Acid-Base Reaction
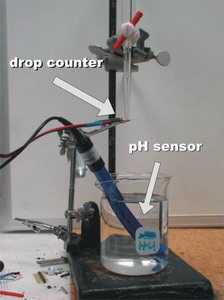
Computer Model
Simulates an acid-base reaction and measures its pH.
Physical Model
A stand, a pipette and a beaker with a drop-counter and a pH sensor. The information is displayed in the NetLogo model and users can see the impact in of adding drops of base in the pH.
Goal
Comparison between a multi-agent-based computer model of acid-base reactions, which students themselves can modify, and a physical apparatus with a pH meter and a drop-counter that monitor the amount of acid-base in the beaker and its pH. By comparing their computer model with the information from the sensors, students can change, debug and refine their model.
Papers
Brady, C., Weintrop, D., Anton, G., & Wilensky, U. (2016). Constructionist Learning at the Group Level with Programmable Badges. In Proc. Constructionism Conf (pp. 61-68).
Blikstein, P. (2010, June). Connecting the science classroom and tangible interfaces: the bifocal modeling framework. In Proceedings of the 9th International Conference of the Learning Sciences-Volume 2 (pp. 128-130). International Society of the Learning Sciences.
Sipitakiat, A., & Blikstein, P. (2010, June). Robotics and environmental sensing for low-income populations: design principles, impact, technology, and results. In Proceedings of the 9th International Conference of the Learning Sciences-Volume 2 (pp. 447-448). International Society of the Learning Sciences.
Blikstein, P., & Wilensky, U. (2007). Bifocal modeling: a framework for combining computer modeling, robotics and real-world sensing. In annual meeting of the American Educational Research Association (AERA 2007), Chicago, USA.
Sipitakiat, A., Blikstein, P., & Cavallo, D. (2002). The GoGo Board: Moving towards highly available computational tools in learning environments. In Proceedings of Interactive Computer Aided Learning International Workshop.